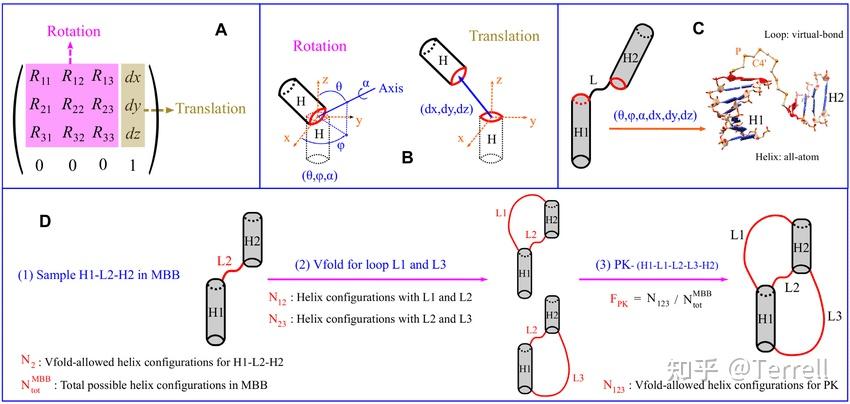
这些知识点并不难,但是这些基础的东西卡壳的时候,更难地算法公式根本就推不动了,比如一个坐标变换矩阵T=\begin{bmatrix} A & b\\ 0 & 1 \end{bmatrix} ,假设只有旋转和平移,那么很显然的问题就是矩阵 A 的列有正交的性质,也就是说 A^{T}A=I ,那么根据分块矩阵的规则可以直接推导出矩阵 T 的逆矩阵是 \begin{bmatrix} A ^{T}& -A^{T}b\\ 0 & 1 \end{bmatrix} ,验证一下 \begin{bmatrix} A & b\\ 0 & 1 \end{bmatrix}\begin{bmatrix} A ^{T}& -A^{T}b\\ 0 & 1 \end{bmatrix}=\begin{bmatrix} A A^{T}& b-AA^{T}b\\ 0 & 1 \end{bmatrix}=I 。在CAD中坐标变换一般都是包含旋转、平移和缩放,这种情况下 A^{T}A=diag(\alpha_{1},\alpha_{2},\alpha_{3}) ,按同样的思路去推导矩阵 T 的逆也是很简单的事情。这些算法如果是在工作中应用,那是可以显著的提高算法效率的,因为逆矩阵的你算速度效率一般比较低,这种推导出来的逆矩阵就是转置和简单的矩阵乘法而已,代码也变得很简洁。
1、在学校本科和研究生



 发表于 2022-11-30 16:00:32
发表于 2022-11-30 16:00:32